Boston Dynamics y Toyota impulsan la Robótica Humanoide con IA
Boston Dynamics y el Toyota Research Institute (TRI) han revelado un logro significativo en el campo de la robótica y la inteligencia artificial, demostrando cómo un Gran Modelo de Comportamiento (LBM, por sus siglas en inglés) puede potenciar al robot humanoide Atlas. Este avance permite a Atlas realizar una serie de tareas del mundo real complejas sin la necesidad de una programación exhaustiva de cada movimiento. En lugar de ser un robot con acciones predefinidas, este nuevo sistema le otorga una capacidad de coordinación de cuerpo completo, unificando la manipulación y la locomoción para un rendimiento más fluido y adaptable. Este desarrollo es un paso fundamental hacia la creación de humanoides de propósito general, máquinas versátiles que pueden operar en entornos impredecibles y desempeñar una amplia gama de funciones.
Modelos de Comportamiento: Un Nuevo Cerebro Robótico
La clave de este avance reside en la implementación de los Grandes Modelos de Comportamiento (LBM). A diferencia de la programación tradicional, que requiere que los ingenieros codifiquen cada acción paso a paso, los LBM funcionan como un cerebro para el robot. Han sido entrenados para entender el movimiento y la toma de decisiones de manera más flexible y natural. Esto significa que en vez de escribir una “rutina de baile” para el robot, se le proporciona una comprensión de alto nivel de las tareas. A partir de ahí, el robot puede deducir de forma autónoma cómo usar todo su cuerpo, incluyendo manos, pies y equilibrio, para completar la tarea. Esta eficiencia es notable; lo que antes tomaba semanas o meses de codificación, ahora se puede añadir en mucho menos tiempo, a menudo sin una sola línea de código nueva. Las habilidades se incorporan rápidamente a través de demostraciones humanas, y a medida que los modelos se fortalecen, necesitan menos demostraciones para lograr comportamientos cada vez más robustos.
Atlas en Acción: Tareas Complejas y Adaptación
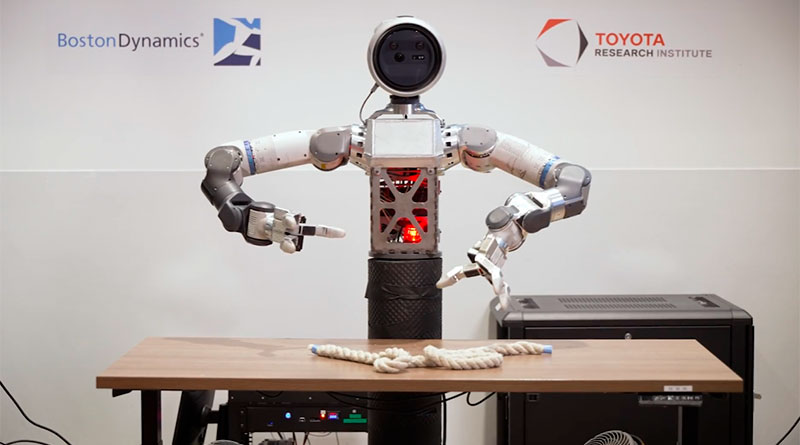
Una de las demostraciones más impresionantes de este nuevo sistema es la capacidad de Atlas para coordinar todo su cuerpo de forma unificada. En lugar de tener sistemas separados para la locomoción y la manipulación, el nuevo modelo trata las manos y los pies de manera similar, controlando todo el robot de la cabeza a los pies. En un video demostrativo, se observa a Atlas ejecutando una serie de tareas complejas como empaquetar, clasificar y organizar objetos, levantándose, agachándose y adaptándose a imprevistos. Un ejemplo destacado es su reacción cuando la tapa de una caja se cierra inesperadamente; en lugar de fallar, el robot se ajusta, desliza la caja y continúa su labor. Esto demuestra que Atlas no solo sigue un plan rígido, sino que puede pensar y adaptarse sobre la marcha. La implementación de LBMs permite una manipulación completa y hábil del cuerpo para tareas como la recogida, colocación y deslizamiento de objetos, así como tareas complejas con materiales deformables, como manipular una cuerda o un neumático.
El Futuro de los Humanoides de Propósito General
La diferencia fundamental entre los robots tradicionales y estos humanoides impulsados por IA es la flexibilidad. Mientras que los robots especializados son excelentes para tareas repetitivas en entornos controlados, los humanoides con LBM pueden lidiar con la imprevisibilidad. Esto los convierte en candidatos ideales para aplicaciones en almacenes, sitios de construcción, zonas de desastre o incluso en el hogar. La visión de Boston Dynamics y el Toyota Research Institute (TRI) no es reemplazar a los humanos, sino amplificar sus capacidades. Robots como Atlas podrían convertirse en asistentes versátiles, liberando a las personas de tareas peligrosas o monótonas. Esta colaboración, iniciada en octubre de 2024, aprovecha la experiencia de Boston Dynamics en robótica móvil y la investigación de TRI en IA y robótica para acelerar el desarrollo de robots inteligentes.
Desafíos y Próximos Pasos
A pesar de los avances, el camino no está exento de retos. La clave para el desarrollo de estos modelos ha sido la recopilación de datos de comportamiento a través de la teleoperación, que combina un sistema de control predictivo con una interfaz de realidad virtual. Con estos datos, se entrena una red neuronal que predice las acciones del robot en tiempo real. Aunque la velocidad de ejecución ya es notable, aún queda mucho trabajo por hacer para escalar el ciclo de datos y mejorar la diversidad y dificultad de las tareas. Los investigadores señalan que estos robots aún deben volverse más confiables, asequibles y seguros antes de que puedan trabajar de manera habitual junto a las personas. Este hito marca un paso crucial hacia un futuro donde los humanoides no son solo herramientas especializadas, sino ayudantes versátiles en entornos no estructurados, capaces de adaptarse y realizar una amplia gama de tareas.
Preguntas Frecuentes
¿Qué es un Gran Modelo de Comportamiento (LBM)?
Un LBM es una tecnología de inteligencia artificial que actúa como el «cerebro» de un robot. A diferencia de la programación tradicional que dicta cada movimiento, un LBM permite al robot comprender tareas a un nivel superior y determinar cómo usar su cuerpo de manera integral para ejecutarlas de forma natural y flexible.
¿Cómo se diferencia el nuevo Atlas de los robots humanoides anteriores?
La principal diferencia radica en su capacidad de coordinación de cuerpo completo. Mientras que los robots anteriores tenían sistemas separados para la locomoción y la manipulación, el nuevo Atlas opera bajo un sistema unificado que controla todos los movimientos del robot, permitiéndole realizar tareas complejas y adaptarse a situaciones inesperadas.
¿Cuál es la visión futura de estos robots?
La visión es que los humanoides como Atlas no sean solo herramientas especializadas para tareas repetitivas, sino asistentes versátiles. Podrían trabajar en entornos impredecibles como almacenes, obras de construcción o incluso hogares, amplificando las habilidades humanas y haciendo la vida más segura y eficiente.